Thomson Linear Motion Optmized


Actuadores lineales de motores paso a paso - Movimiento del eje
Detalles de productos
En un actuador lineal con motor paso a paso (SMLA), el movimiento se logra enviando pulsos eléctricos controlados a los arrollamientos internos de un motor paso a paso. Alimentar estos arrollamientos en un orden temporal específico le permite al programador manipular la rotación del eje del motor y, así, inducir el movimiento.
Este documento está disponible para descargar en formato PDF aquí.
La configuración más básica del sistema para impulsar un actuador lineal con motor paso a paso (SMLA) en lazo abierto incluye los siguientes componentes:
- Controlador lógico programable (PLC), computadora personal (PC) o microcontrolador
- Controlador de movimiento
- Accionamiento de motor paso a paso

Configuración básica en lazo abierto
Configuración básica en lazo abierto
PLC, PC o microcontrolador
El PLC, la PC o el microcontrolador pueden considerarse el "cerebro" o la unidad central de procesamiento (CPU) del sistema. En ellos se almacena el programa principal, que es la principal interfaz entre el usuario y el sistema, así como la interfaz principal con otros periféricos y sensores del sistema. Un PLC, una PC o un microcontrolador también desempeñan funciones de supervisión, control y coordinación entre varios SMLA y periféricos/sensores del sistema en caso de ser necesario. Aunque un PLC, una PC o un microcontrolador generalmente desempeñan una función similar, existen diferencias entre ellos:
Controlador lógico programable (PLC)
Un PLC es una computadora "desnuda", sin teclado, monitor ni mouse conectados. Se trata de computadoras diseñadas específicamente para aplicaciones industriales, en los que es común la exposición a condiciones exigentes (polvo, suciedad, golpes, etc.). Por lo general, un PLC se programa desde una computadora que ejecuta software exclusivo provisto por el fabricante, por lo que no siempre se requiere un programador experimentado.
Computadora personal (PC)
En algunos casos, se puede emplear una computadora estándar como CPU de un sistema de actuador lineal con motor paso a paso (SMLA). Con las tarjetas de interfaz o los puertos adecuados, una PC se puede conectar directamente a un controlador de movimiento o un accionamiento. A menudo, los controladores de movimiento y los accionamientos también vienen con software privado que permite usarlos sin un PLC. Si el controlador de movimiento o el accionamiento del motor paso a paso no incluyen software de programación del movimiento, se requerirá la participación de un programador experimentado para vincular y usar correctamente el sistema SMLA.
Microcontroladores
Los microcontroladores son similares a los PLC pero mucho más minimalistas (no tienen gabinete, software exclusivo, etc.). Los microcontroladores están diseñados para incorporarse a sistemas eléctricos o placas de circuito más complejos. Aunque utilizar un microcontrolador requiere mucho más trabajo (ya que hay que comenzar “desde cero”), esta alternativa también ofrece una libertad mucho mayor en lo que respecta a la programación y la integración eléctrica con un sistema más amplio. Además, el costo total es menor que en el caso de los PLC y las PC. Dado que los microcontroladores son mucho más minimalistas que los PLC, generalmente se requiere un programador experimentado que construya el software “desde cero”.
Controlador de movimiento
En algunos casos, la señal que se envía desde el PLC, la PC o el microcontrolador no es adecuada para que el accionamiento del motor la utilice. En estos casos, se requiere un controlador de movimiento que tome las instrucciones del PLC, la PC o el microcontrolador y las convierta en algo que pueda aplicarse al accionamiento del motor paso a paso. Se pueden enviar señales al controlador de movimiento, que se encargará de manipular la posición, la velocidad y el par del SMLA. Los controladores de movimiento también se conocen como “generadores de pulsos” ya que su forma de comunicarse con el accionamiento del motor paso a paso es enviar pulsos eléctricos de diferentes amplitudes y frecuencias. Muchos accionamientos de motores paso a paso modernos tienen un controlador integrado directamente. Esto evita la necesidad de usar un controlador externo y permite enviar la señal del PLC, la PC o el microcontrolador directamente al motor. A continuación, se muestra un sistema básico que combina un controlador y un accionamiento.

Configuración que combina un controlador de movimiento y un accionamiento de motor paso a paso.
Configuración que combina un controlador de movimiento y un accionamiento de motor paso a paso.
Accionamiento del motor paso a paso
El accionamiento del motor paso a paso es el vínculo entre el controlador y el motor paso a paso del SMLA. Esta unidad puede considerarse un traductor entre el controlador y el motor paso a paso. El accionamiento interpreta las señales del controlador y las convierte/amplifica hasta una corriente que el motor pueda usar. En otras palabras, el accionamiento proporciona la potencia necesaria para impulsar el motor paso a paso. La corriente máxima y la resolución de los micropasos generalmente se configuran en el accionamiento mediante interruptores DIP instalados directamente en la unidad.
Sistemas en lazo cerrado
En algunas situaciones, el sistema requiere una retroalimentación del SMLA. Si su señal se interpreta correctamente, el encoder conectado directamente al motor puede proporcionar una retroalimentación de posición instantánea. Un PLC, una PC, un microcontrolador, un accionamiento o un controlador de movimiento compatibles pueden leer esta señal del encoder y realizar los ajustes y las correcciones pertinentes en el movimiento del SMLA. En las siguientes figuras se ilustran dos posibles sistemas de retroalimentación para SMLA.
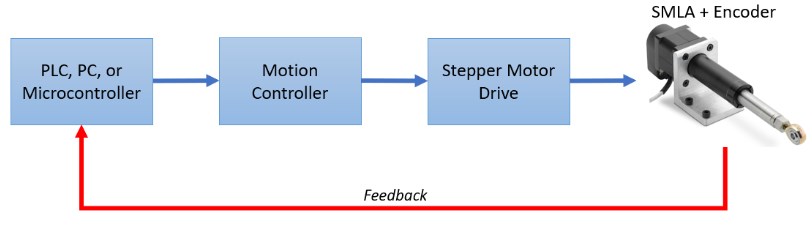
Sistema básico de actuador lineal con motor paso a paso en lazo cerrado
Sistema básico de actuador lineal con motor paso a paso en lazo cerrado
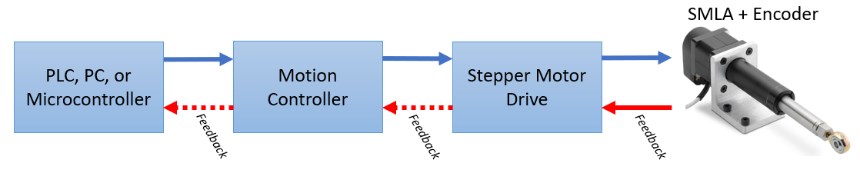
Retroalimentación directa al accionamiento del motor
Retroalimentación directa al accionamiento del motor
Este documento está disponible para descargar en formato PDF aquí.
